Рассмотрим на этом занятии подключение ИК приемника к Ардуино. Расскажем какую библиотеку следует использовать для IR приемника, продемонстрируем скетч для тестирования работы инфракрасного приемника от пульта дистанционного управления и разберем команды в языке C++ для получения сигнала. Сразу отметим, что IR датчик Ардуино подходит не к каждому пульту, частота сигнала может отличаться.
Устройство ИК приемника. Принцип работы
Приемники инфракрасного излучения получили сегодня широкое применение в бытовой технике, благодаря доступной цене, простоте и удобству в использовании. Эти устройства позволяют управлять приборами с помощью пульта дистанционного управления и их можно встретить практически в любом виде техники. Но, несмотря на это, постепенно Bluetooth модуль набирает все большую популярность.
Принцип работы IR ресивера. Обработка сигнала от пульта ДУ
ИК-приемник на Ардуино способен принимать и обрабатывать инфракрасный сигнал, в виде импульсов заданной длительности и частоты. Используется при изготовлении датчика препятствия и дальномера для Arduino. Обычно ИК-приемник имеет три ножки и состоит из следующих элементов: PIN-фотодиод, усилитель, полосовой фильтр, амплитудный детектор, интегрирующий фильтр и выходной транзистор.
Под действием инфракрасного излучения в фотодиоде, у которого между p и n областями создана дополнительная область из полупроводника (i -область), начинает течь ток. Сигнал поступает на усилитель и далее на полосовой фильтр, который настроен на фиксированную частоту: 30; 33; 36; 38; 40 и 56 килогерц и защищает приемник от помех. Помехи могут создавать любые бытовые приборы.
Чтобы сигнал от пульта ДУ принимался ИК приемником Ардуино, пульт должен быть с той же частотой, на которую настроен фильтр в IR приемнике. Поэтому не каждый пульт дистанционного управления подойдет для работы. Следует подбирать IR приемник и IR передатчик с одной частотой. После фильтра сигнал поступает на амплитудный детектор, интегрирующий фильтр и выходной транзистор.
Как подключить ИК приемник к Ардуино
Корпуса инфракрасных приемников содержат оптический фильтр для защиты прибора от внешних электромагнитных полей, изготавливаются они специальной формы для фокусировки принимаемого излучения на фотодиоде. Для подключения IR приемника к Arduino UNO используют три ножки, которые соединяют с — GND, 5V и A0. Советуем для начала использовать 3,3 Вольта, чтобы не сжечь ИК датчик при настройке.
Для занятия нам понадобятся следующие детали:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- макетная плата;
- IR приемник;
- пульт ДУ;
- 1 светодиод и резистор 220 Ом;
- провода «папа-папа» и «папа-мама».

 Схема подключения ИК приемника к аналоговому порту Ардуино
Схема подключения ИК приемника к аналоговому порту Ардуино
Подключите IR приемник по схеме, представленной выше, и подключите светодиоды к 12 и 13 пину. Перед загрузкой программы, вам потребуется установить библиотеку IRremote.h, если она не была еще установлена. Данная библиотека не относится к стандартным библиотекам среды программирования Arduino IDE. Скачать библиотеку IRremote.h и готовый скетч можно одним архивом с Google Диск по ссылке .
Скетч для ИК приемника Arduino:
#includeПояснения к коду:
- Библиотека IRremote.h содержит набор команд и позволяет упростить скетч;
- Оператор decode_results присваивает получаемым сигналам от пульта дистанционного управления имя переменной results .
ИК датчик можно применять во многих устройствах на микроконтроллере Ардуино, в том числе, можно сделать дистанционное управление сервоприводом на Ардуино от ИК приемника. При настройке следует включить монитор порта Arduino IDE и узнать какой сигнал отправляет та или иная кнопка на пульте ДУ. Полученные коды следует использовать в скетче после знака двойного равенства в условиях if () .
Записи по этой теме:

- Входное напряжение: 2,7 ... 5,5 В
- Потребляемый ток: 0,65 … 1,05 мА (при Vсс = 5В) номинально 0,9 мА
- Несущая частота: 38 кГц
- Длинна световой волны: 850 … 1050 нм (пропускаемая фильтром более 80%)
- Чувствительность: 0,17… 30000 мW/м2 (к мощности светового потока)
- Расстояние приёма: до 45 м
- Рабочая температура: -25 … 85 °C
- Угол направленности: ±45°
Все модули линейки "Trema" выполнены в одном формате
Подключение:
Модуль подключается к любому цифровому выводу arduino. В комплекте имеется кабель для быстрого и удобного подключения к Trema Shield .
Модуль удобно подключать 3 способами, в зависимости от ситуации:
Способ - 1: Используя проводной шлейф и Piranha UNO

Библиотека использует второй аппаратный таймер,
НЕ ВЫВОДИТЕ СИГНАЛЫ ШИМ НА 3 ИЛИ 11 ВЫВОД!
Подробнее про установку библиотеки читайте в нашей ..
Дополнительная информация по работе с модулем:
Пакеты: Практически все пульты отправляют не только информационный пакет (указывающий тип устройства и код нажатой кнопки), но и пакеты повтора, сообщающие устройству об удержании нажатой кнопки. Таким образом принимающее устройство может реагировать на нажатие кнопки однократно или в течении всего времени её удержания.
Например: нажимая и удерживая кнопку с номером телевизионного канала, телевизор переключится на данный канал только один раз. В то время, как нажимая и удерживая кнопку увеличения громкости, телевизор будет её увеличивать в течении всего времени удержания кнопки.
Количество информационных пакетов у большинства пультов равно одному, но некоторые устройства, например кондиционеры, используют 2, 3 и более информационных пакетов.
Состав пакетов: Информационный пакет несёт информацию о коде производителя, типе устройства, коде нажатой кнопки и т.д. Пакеты повтора могут частично или полностью совпадать с информационным пакетом, копировать его биты с инверсией, или не нести никакой информации, представляя последовательность из нескольких одинаковых, для каждого пакета повтора, битов.
Длительность пауз между пакетами: обычно не превышает 200мс.
Протоколы передачи данных: определяют следующие, основные, параметры:
- несущую частоту;
- способ кодирования информации, длительность импульсов и пауз передаваемых битов;
- количество информационных пакетов:
- состав информационного пакета и пакетов повторов;
- длительность пауз между пакетами;
- наличие и форму сигналов Start, Stop и Toggle;
Несущая частота: у большинства пультов равна 38 кГц, именно на эту частоту настроен Trema ИК-приёмник .
Кодирование информации: это принцип передачи битов данных. Выделим три основных вида кодирования, при которых каждый бит передаётся последовательностью из одного импульса и одной паузы:
- кодирование длиной импульсов - сначала передаётся импульс, длина которого зависит от значения передаваемого бита, затем следует пауза, длина которой не зависит от значения бита. Например: в протоколе SIRC (Sony), длина импульса для бита «1» = 1200мкс, а для бита «0» = 600мкс, длина пауз всегда равна 600мкс. Таким образом можно отличить «1» от «0» по длине импульса.
- кодирование длинной пауз - сначала передаётся импульс, длина которого не зависит от значения передаваемого бита, затем следует пауза, длина которой зависит от значения бита. Например: в протоколе NEC, длина паузы для бита «1» = 1687,5мкс, а для бита «0» = 562,5мкс, длина импульсов всегда равна 562,5мкс. Таким образом можно отличить «1» от «0» по длине паузы.
- бифазное кодирование - длина импульса равна длине паузы, а их последовательность определяет тип передаваемого бита. Например: в протоколе RS5 (Philips), для бита «1» импульс следует за паузой, а для бита «0» пауза следует за импульсом. Для протокола NRC (Nokia), наоборот, для бита «1» пауза следует за импульсом, а для бита «0» импульс следует за паузой.
Сигналы Start, Stop и Toggle: по своему названию располагаются в начале, конце или середине пакета.
Stop: При кодировании длинной паузы, нельзя определить значение последнего бита в пакете, так как после пакета следует большая пауза, и последний бит будет всегда определяться как «1», поэтому в пакет добавляется сигнал Stop представляющий из себя импульс не несущий никакой информации.
Start: При бифазном кодировании требуется подать сигнал Start, так как невозможно начать передачу пакета с паузы.
Toggle: Это бит, который меняет своё значение при каждом новом нажатии на кнопку, используется в протоколах RS5, RS5X, RS6 (Philips), где пакеты повторов полностью повторяют данные информационного пакета. Таким образом принимающее устройство может отличить удержание кнопки от её повторного нажатия.
Примеры:
Проверка наличия данных поступивших с ИК-пульта , осуществляется функцией check(). Эта функция реагирует на нажатие кнопок ИК-пульта , но если её вызывать с параметром true , то она будет реагировать и на удержание кнопок.
Чтение данных с любого пульта, реагируем только на нажатие кнопок:
#includeВ данном скетче функция check() вызывается без аргументов, значит и реагирует она только на нажатия кнопок ИК-пульта .
Чтение данных с любого пульта, реагируем на удержание кнопок:
#includeВ данном скетче функция check() вызывается с параметром true , значит и реагирует она как на нажатия, так и на удержания кнопок ИК-пульта .
Чтение данных с любого пульта, с указанием как реагировать на какие кнопки.
#includeВ данном скетче функция check() вызывается с параметром true , значит она реагирует как на нажатия, так и на удержания кнопок ИК-пульта . Но вывод данных в монитор последовательного порта осуществляется только при установленном флаге flgKey , который сбрасывается при удержании кнопок с кодами 0xFF30CF , 0xFF18E7 и 0xFF7A85 . Получается что на 3 кнопки скетч реагирует только при нажатии, а на остальные кнопки, как на нажатие, так и на удержание.
Чтение данных только с тех пультов, которые работают по указанному протоколу:
#includeВ данном скетче, в коде setup(), указан протокол передачи данных, который редко совпадает у разных производителей ИК-пультов . Значит функция check() в коде loop() будет реагировать только на те ИК-пульты , которые поддерживают указанный протокол.
Получение протокола передачи данных и типа кодировки:
#includeВ данном примере описано как получить протокол передачи данных ИК-пультов . В статье , описано, как передавать коды кнопок по указанному протоколу.
Таким образом, можно создать скетч ИК-передатчика для имитации сигналов различных ИК-пультов . В результате, устройства будут реагировать на ИК-передатчик , как на собственный ИК-пульт .
Описание основных функций библиотеки:
Подключение библиотеки:
#includeФункция begin();
- Назначение: инициализация работы с ИК-приёмником
- Синтаксис: begin();
- Параметры: Нет.
- Возвращаемые значения: Нет.
- Примечание: Вызывается 1 раз в коде setup.
- Пример:
Функция check();
- Назначение: Проверка наличия принятых с пульта данных.
- Синтаксис: check([ УДЕРЖАНИЕ ]);
- Параметры:
- УДЕРЖАНИЕ - необязательный параметр, типа bool - указывающий что необходимо реагировать на удержание кнопок пульта.
- Возвращаемые значения: bool - приняты или нет, данные с пульта.
- Примечание: Если функция вызвана без параметра, или он равен false, то функция будет реагировать только на сигналы с пульта при нажатии его кнопок, а если указать true, то функция будет реагировать, как на нажатие, так и на удержание кнопок пульта.
- Пример:
Функция protocol();
- Назначение: Получение, установка или сброс протокола передачи данных.
- Синтаксис: protocol([ ПАРАМЕТР ]);
- Получение протокола: Если функция вызвана без параметра, то она вернёт строку из 25 символов + символ конца строки. Биты данной строки, несут информацию о типе протокола передачи данных пульта, данные которого были приняты последними. Данную строку можно использовать для установки протокола ИК-передатчику, или ИК-приёмнику (см.ниже).
- Установка протокола: Если функция вызвана с параметром в виде строки из 25 символов протокола + символ конца строки, то после этого, функция chek(), будет реагировать только на пульты, соответствующие указанному протоколу передачи данных.
- Сброс протокола: Если функция вызвана с параметром IR_CLEAN, то функция chek() опять станет реагировать на сигналы с любых пультов.
- Получение параметров протокола: Если функция вызвана с параметром int, от 0 до 17, то она вернёт не строку протокола, а значение типа int с одним из параметров протокола передачи данных пульта, данные которого были приняты последними:
- 0 - тип кодировки:
- IR_UNDEFINED - тип кодировки не определён;
- IR_PAUSE_LENGTH - кодирование длинной паузы;
- IR_PULSE_LENGTH - кодирование длинной (шириной) импульса (ШИМ);
- IR_BIPHASIC - бифазное кодирование;
- IR_BIPHASIC_INV - бифазное кодирование с инверсными битами;
- IR_NRC - пакеты повтора идентичны, а первый и последний пакеты специальные;
- IR_RS5 - кодировка PHILIPS с битом toggle;
- IR_RS5X - кодировка PHILIPS с битом toggle;
- IR_RS6 - кодировка PHILIPS с битом toggle.
- 1 - несущая частота передачи данных (в кГц);
- 2 - заявленное количество информационных бит в 1 пакете;
- 3 - заявленное количество информационных бит в пакете повтора;
- 4 - длительность паузы между пакетами (в мс);
- 5 - длительность импульса в стартовом бите (в мкс);
- 6 - длительность паузы в стартовом бите (в мкс);
- 7 - длительность импульса в стоповом бите (в мкс);
- 8 - длительность паузы в стоповом бите (в мкс);
- 9 - длительность импульса в бите рестарт или toggle (в мкс);
- 10 - длительность паузы в бите рестарт или toggle (в мкс);
- 11 - позиция бита рестарт или toggle в пакете (№ бита);
- 12 - максимальная длительность импульса в информационных битах (в мкс);
- 13 - минимальная длительность импульса в информационных битах (в мкс);
- 14 - максимальная длительность паузы в информационных битах (в мкс);
- 15 - минимальная длительность паузы в информационных битах (в мкс);
- 16 - флаг наличия стартового бита (true/false);
- 17 - флаг наличия стопового бита (true/false);
- 18 - флаг наличия бита рестарт или toggle (true/false);
- 19 - тип пакета повтора (0-нет, 1-с инверсными битами, 2-идентичен информационному, 3-уникален);
- 0 - тип кодировки:
- Возвращаемые значения: Зависят от наличия и типа параметра.
- Примечание: Если ранее был установлен протокол, то попытка получения протокола, или параметров протокола, вернёт значения установленного ранее протокола, а не протокола передачи данных пульта, данные которого были приняты последними.
- Пример:
Переменная data
- Значение: Возвращает код кнопки, принятый с пульта;
- Тип данных: uint32_t.
Переменная length
- Значение: Возвращает размер кода кнопки, в битах;
- Тип данных: uint8_t.
Переменная key_press
- Значение: Возвращает флаг, указывающий на то, что кнопка пульта нажимается а не удерживается;
- Тип данных: bool.
Применение:
- управление роботами, движущимися, летающими и плавающими моделями, бытовой и специализированной техникой.
- включение/выключение освещения, обогрева, вентиляции, полива и т.д.
- открывание/закрывание дверей, жалюзи, мансардных окон, форточек и т.д.
Модуль ИК Приемника в связке и ИК пультом дистанционного управления позволит легко реализовать дистанционное управление платой Arduino.
Он представляет из себя не что иное, как ИК приемник VS1838B с установленной на плате рекомендуемой производителем обвязкой.
Для работы с данным модулем "из коробки" необходим ПДУ с частотой 38 кГц.
Плюсом данной платы является цанговый разъем, позволяющий без применения пайки заменить ИК приемник на другой, работающий на частоте, необходимой для вашего проекта.
Основные технические характеристики:
Напряжение питания: 2.7 - 5.5В
Частота модуляции: 38кГц
Диапазон температур: - 20 ... + 80°C
Интерфейс: Цифровой
Подключение к Arduino
Модуль оборудован трехпиновым разъемом стандарта 2.54мм
: подключается к выводу GND
: подключается к выводу +5V
: подключается к цифровому выводу (в примере D2)

Пример работы в среде Arduino
Для работы с данным модулем необходимо установить библиотеку IRRemote
Скачиваем, распаковываем и закидываем в папку libraries в папке Arduino. В случае, если на момент добавления библиотеки, Arduino IDE была открытой, перезагружаем среду.
Считывание показаний кнопок ПДУ
Для считывания показаний пульта заливаем нижеприведенный скетч. Он будет выводить в порт кодировки нажатых кнопок.
В качестве примера будем использовать пульт, как на картинке, т.к. пульт такого типа идет в наборе
Про отличия в логике работы различных пультов можно прочитать в статье-оригинале от члена нашего сообщества под ником

Пример программного кода:
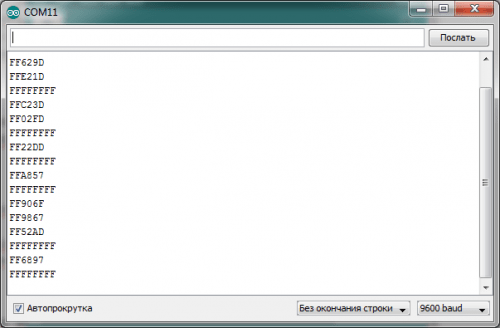
#includeВ мониторе порта должны увидеть слудущее:
При почти секундном удержании каждой кнопки, мы получаем около 10 кодов. Первый из них и является кодом кнопки. А после него начинает идти стандартный код, который сообщает о залипании кнопки.
Управление платой Arduino c ПДУ
Заставим светодиод на плате Arduino (D13) загораться при получении кодировки первой кнопки и выключаться при получении кодировки второй.
Пример программного кода:
// Тестировалось на Arduino IDE 1.0.3 #includeИнфракрасный пульт дистанционного управления — один из самых простых способов взаимодействия с электронными приборами. Так, практически в каждом доме есть несколько таких устройств: телевизор, музыкальный центр, видеоплеер, кондиционер. Но самое интересное применение инфракрасного пульта — дистанционное правление роботом. Собственно, на этом уроке мы попытаемся реализовать такой способ управления с помощью популярного контроллера Ардуино Уно.
1. ИК-пульт
Что нужно для того, чтобы научить робота слушаться инфракрасного (ИК) пульта? Во-первых, нам потребуется сам пульт. Можно использовать обычный пульт от телевизора, а можно приобрести миниатюрный пульт от автомагнитолы. Именно такие пульты часто используются для управления роботами. На таком пульте есть 10 цифровых кнопок и 11 кнопок для манипуляции с музыкой: громкость, перемотка, play, stop, и т.д. Для наших целей более чем достаточно.2. ИК-датчик
Во-вторых, для приема сигнала с пульта нам потребуется специальный ИК-датчик. Вообще, мы можем детектировать инфракрасное излучение обычным фотодиодом/фототранзистором, но в отличие от него, наш ИК-датчик воспринимает инфракрасный сигнал только на частоте 38 кГц (иногда 40кГц). Именно такое свойство позволяет датчику игнорировать много посторонних световых шумов от ламп освещения и солнца. Для этого урока воспользуемся популярным ИК-датчиком VS1838B , который обладает следующими характеристиками:- несущая частота: 38 кГц;
- напряжение питания: 2,7 — 5,5 В;
- потребляемый ток: 50 мкА.
3. Подключение
Датчик имеет три вывода (три ноги). Если посмотреть на датчик со стороны приёмника ИК сигнала, как показано на рисунке,- то слева будет - выход на контроллер,
- по центру - отрицательный контакт питания (земля),
- и справа - положительный контакт питания (2.7 — 5.5В).
 Внешний вид макета
Внешний вид макета

4. Программа
Подключив ИК-датчик будем писать программу для Ардуино Уно. Для этого воспользуемся стандартной библиотекой IRremote , которая предназначена как раз для упрощения работы с приёмом и передачей ИК сигналов. С помощью этой библиотеки будем принимать команды с пульта, и для начала, просто выводить их в окно монитора последовательного порта. Эта программа нам пригодится для того, чтобы понять какой код дает каждая кнопка. #include "IRremote.h" IRrecv irrecv(2); // указываем вывод, к которому подключен приемник decode_results results; void setup() { Serial.begin(9600); // выставляем скорость COM порта irrecv.enableIRIn(); // запускаем прием } void loop() { if (irrecv.decode(&results)) { // если данные пришли Serial.println(results.value, HEX); // печатаем данные irrecv.resume(); // принимаем следующую команду } } Загружаем программу на Ардуино. После этого, пробуем получать команды с пульта. Открываем монитор последовательного порта (Ctrl+Shift+M), берём в руки пульт, и направляем его на датчик. Нажимая разные кнопочки, наблюдаем в окне монитора соответствующие этим кнопкам коды. Проблема с загрузкой программы
В некоторых случаях, при попытке загрузить программу в контроллер, может появиться ошибка:
TDK2 was not declared In his scope
Чтобы ее исправить, достаточно удалить два файла из папки библиотеки. Заходим в проводник. Переходим в папку, где установлено приложение Arduino IDE (скорее всего это «C:\Program Files (x86)\Arduino»). Затем в папку с библиотекой:
…\Arduino\libraries\RobotIRremote
, и удаляем файлы: IRremoteTools.cpp
и IRremoteTools.h.
Затем, перезапускаем Arduino IDE, и снова пробуем загрузить программу на контроллер.
Проблема с загрузкой программы
В некоторых случаях, при попытке загрузить программу в контроллер, может появиться ошибка:
TDK2 was not declared In his scope
Чтобы ее исправить, достаточно удалить два файла из папки библиотеки. Заходим в проводник. Переходим в папку, где установлено приложение Arduino IDE (скорее всего это «C:\Program Files (x86)\Arduino»). Затем в папку с библиотекой:
…\Arduino\libraries\RobotIRremote
, и удаляем файлы: IRremoteTools.cpp
и IRremoteTools.h.
Затем, перезапускаем Arduino IDE, и снова пробуем загрузить программу на контроллер.
5. Управляем светодиодом с помощью ИК-пульта
Теперь, когда мы знаем, какие коды соответствуют кнопкам пульта, пробуем запрограммировать контроллер на зажигание и гашение светодиода при нажатии на кнопки громкости. Для этого нам потребуется коды (могут отличаться, в зависимости от пульта):- FFA857 — увеличение громкости;
- FFE01F — уменьшение громкости.
В сегодняшней статье будет рассматриваться подключение ИК приемника TSOP34836 к плате Aduino UNO. Для этих целей можно применить любой имеющийся у вас приемник, совместимый с вашим пультом по частоте. Назначение выводов показано на рисунке.
1. Vout – выход приемника.
2. GND – «земля», общий провод.
3. Vcc – питание.
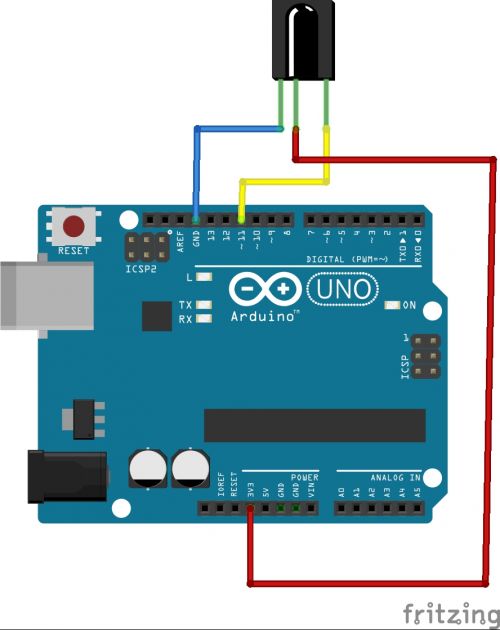
Передача данных от ИК пульта к приемнику осуществляется по протоколу RC5, представляющий из себя последовательность импульсов. Подключение осуществляется по следующей схеме.
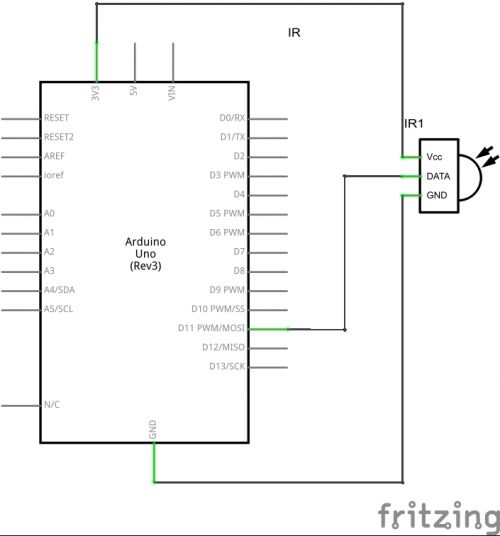
А собрав, получаем примерно следующее:
Для обработки данных, передаваемых пультом, используем библиотеку IRremote, данная библиотека прикреплена к статье. Вставляем следующий код:
#include "IRremote.h" IRrecv irrecv(11); // Указываем пин, к которому подключен приемник decode_results results; void setup() { Serial.begin(9600); // Выставляем скорость COM порта irrecv.enableIRIn(); // Запускаем прием } void loop() { if (irrecv.decode(&results)) // Если данные пришли { Serial.println(results.value, HEX); // Отправляем полученную данную в консоль irrecv.resume(); // Принимаем следующую команду } }
Теперь в консоле COM - порта можно наблюдать код нажимаемой клавиши в HEX.
Вот и все, теперь можно использовать эту схему в ваших устройствах. Ниже приведен пример одного из практических применений ИК - приемника.
В качестве демонстрации будет показано, как с помощью ИК-пульта управлять сервомашинкой.
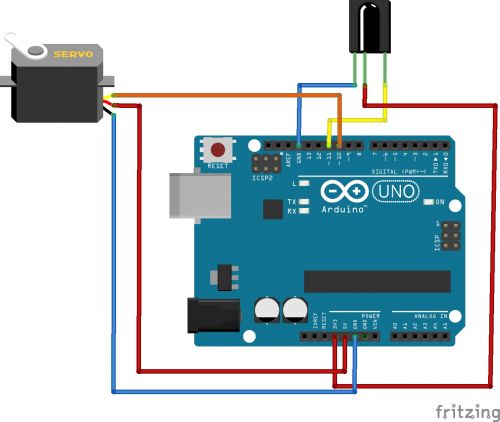
Схема устройства:

Вот так оно должно выглядеть:
Для работы устройства используем следующий код:
#include "Servo.h" #include "IRremote.h" IRrecv irrecv(11); decode_results results; Servo servoMain; int servPoz = 90; //Начальное положение сервы int lastPoz = 0; void setup() { irrecv.enableIRIn(); servoMain.attach(10); // Servo присоединен к 10 выводу servoMain.write(servPoz); } void loop() { if (irrecv.decode(&results)) { int res = results.value; Serial.println(res, HEX); if(res==0xFFFF906F)// Если нажата кнопка "+" { lastPoz=res; servPoz++; servoMain.write(servPoz); } else if(res==0xFFFFA857)// Если нажата кнопка "-" { servPoz--; lastPoz=res; servoMain.write(servPoz); } else if(res==0xFFFFFFFF)// Если кнопку удерживают { if(lastPoz==0xFFFF906F) servPoz++;// Удерживают "+" if(lastPoz==0xFFFFA857) servPoz--;// Удерживают "-" servoMain.write(servPoz); } irrecv.resume(); delay(100); } }
Пульт используется какой-то китайский, при нажатии "+" серва вращается в одну сторону, при нажатии "-", в другую.